| Active balancing of a humanoid robot is a challenging task due to the complexity of combining a walking gait, dynamic balancing, vision and high-level behaviors. My Ph.D research focuses on the active balancing and push recovery problems that allow inexpensive humanoid robots to balance while standing and walking, and to compensate for external forces. In this research, I have proposed a push recovery mechanism that employs two machine learning techniques, Reinforcement Learning (RL) and Deep Reinforcement Learning (DRL) to learn recovery step trajectories during push recovery using a closed-loop feedback control. I have implemented a 3D model using the Robot Operating System (ROS) and Gazebo. To reduce wear and tear on the real robot, I used this model for learning the recovery steps for different impact strengths and directions. I evaluated my approach in both in the real world and in simulation. All the real world experiments are performed by Polaris, a teensized humanoid robot in the Autonomous Agent Laboratory (AALab), University of Manitoba. The design, implementation, and evaluation of hardware, software, and kinematic models are discussed in this document. |
| Dangerous domains are a challenge for teams of heterogeneous robots, since robot losses may involve the loss of particular skills that might be rare in the domain. Previous research has resulted in a framework that allows teams to rebalance and recruit from the environment. However, there is currently no consideration of situations where agents may at times provide more useful work globally by not joining a team, or situations where it might be discovered that types of work might be associated with a given locality. My thesis extends this framework to give agents the ability to refuse to join teams and work for times on their own, by considering current satisfaction in the use of their skills, the likely rarity of their skills, and the distribution of places those skills are used in the environment. I examine this work in a simulated Urban Search and Rescue domain. My results show that in scenarios where a robot's special skills are rare and tasks requiring those skills are only available at a few xed locations in the environment, a robot is more useful if it suspends its team commitment to make itself available to all teams. |
| The ability to function socially, both directly in groups and indirectly through understanding the needs and perspectives of others, is an important part of intelligent behavior. This chapter introduces important elements of multi-agent and multi-robot systems and focuses on the particular issues brought about when humanoid robots are employed. Previous work using humanoid robots - both inside and outside of robotics competitions - is reviewed, and open problems are discussed. |
| Active balancing in autonomous humanoid robots is a challenging task due to the complexity of combining a walking gait with dynamic balancing, vision and high-level behaviors. Humans not only walk successfully over even and uneven terrain, but can recover from the interaction of external forces such as impacts with obstacles and active pushes. While push recovery has been demonstrated successfully in expensive robots, it is more challenging with robots that are inexpensive, with limited power in actuators and less accurate sensing. This work describes a closed-loop control method that uses an accelerometer and gyroscope to allow an inexpensive humanoid robot to actively balance while walking and recover from pushes. An experiment is performed to test three hand-tuned closed-loop control configurations; using only a the gyroscope, only the accelerometer, and a combination of both sensors to recover from pushes. Experimental results show that the combination of gyroscope and accelerometer outperforms the other methods with 100% recovery from a light push and 70% recovery from a strong push. |
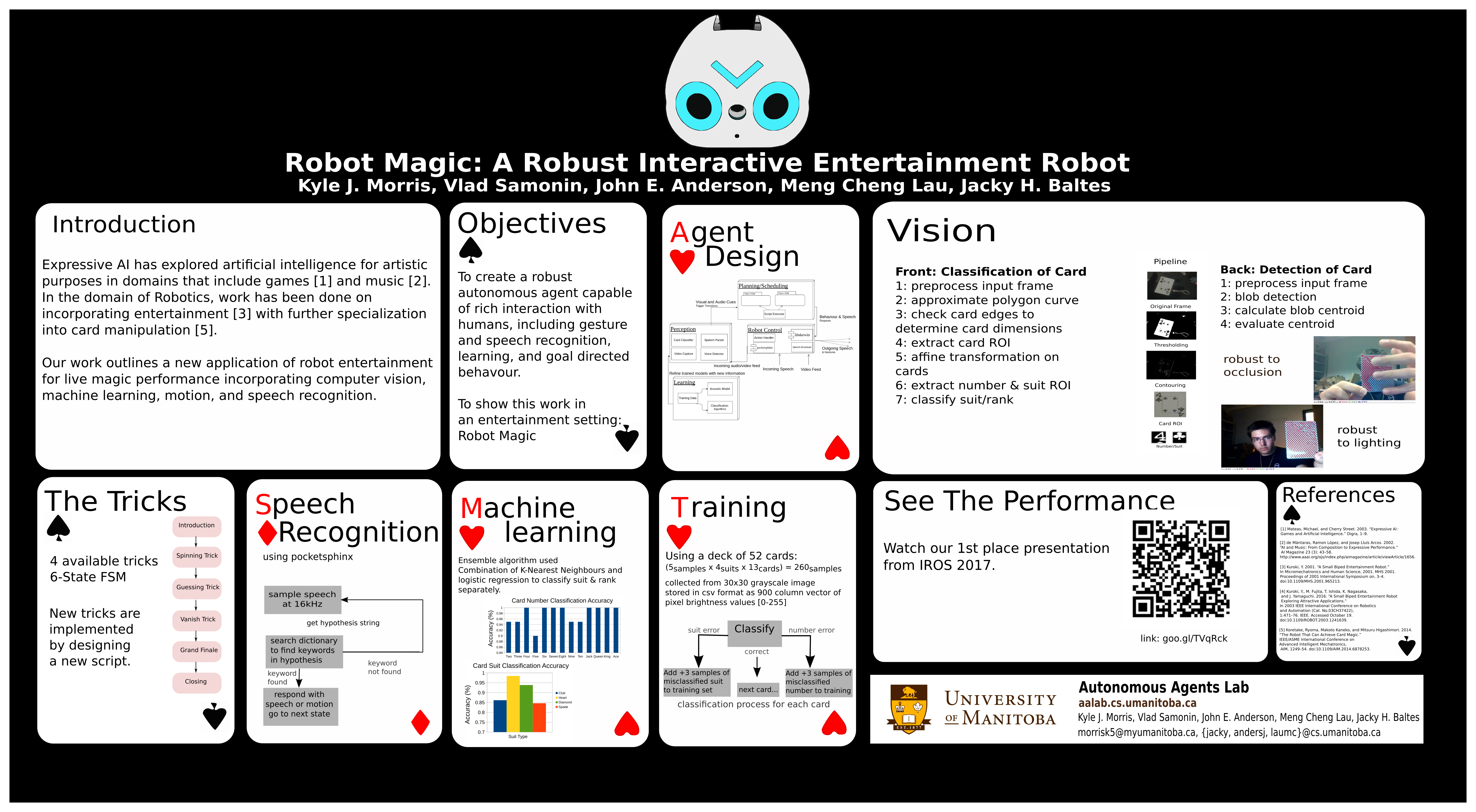
| Magicians have been a source of entertainment for many centuries, with the ability to play on human bias, and perception to create an entertaining experience. There has been rapid growth in robotics throughout industrial applications; where primary challenges in- clude improving human-robot interaction, and robotic perception. Despite preliminary work in expressive AI, which aims to use AI for entertainment; there has not been direct application of fully embodied autonomous agents (vision, speech, learning, planning) to enter- tainment domains. This paper describes preliminary work towards the use of magic tricks as a method for developing fully-embodied autonomous agents. A card trick is developed requiring vision, communica- tion, interaction, and learning capabilities all of which are coordinated using our script representation. Our work is evaluated quantitatively through experimen- tation, and qualitatively through acquiring 2nd place at the 2016 IROS Humanoid Application Challenge. A video of the live performance can be found at https://youtu.be/OMpcmcPWAVM |
| In recent years, there have been a number of popular robotics competitions whose intent is to advance the state of research by comparing embodied entries against one another in real time. The IEEE Humanoid application challenge is intended to broaden these by allowing more open-ended entries, with a general theme within which entrants are ective application involving a humanoid robot. This year's theme was Robot Magic, and this paper describes our rst-place winning entry in the 2017 competition, running on a ROBOTIS OP2 humanoid robot. We describe the overall agent design and contributions to perception, learning, control, and representation, which together support a robust live robot magic performance. |
| Cost-effectiveness, management of risk, and simplicity of design are all arguments in favour of using heterogeneous multi-robot teams in dangerous domains. Robot losses are expected to occur and the loss of useful skills means that replacement robots - either released into the environment or previously lost and rediscovered - must be recruited for useful work. While teams of robots may eventually encounter replacements by chance, more active search strategies can be used to locate them more quickly, either to complete a single task or join a team. These searches, however, must be balanced with existing tasks so that the team can still perform useful work in the domain. This paper describes additions that we have made to an existing framework for managing dynamic teams in dangerous domains in order to support this goal. |
 [bibtex-key = 17PosterComp}]
[bibtex-entry]
[bibtex-key = 17PosterComp}]
[bibtex-entry]
| Using teams of autonomous, heterogeneous robots to operate in dangerous environments has a number of advantages. Among these are cost-effctiveness and the ability to spread out skills among team members. The nature of operating in dangerous domains means that the risk of loss is higher - teams will often lose members and must acquire new ones. In this work, I explore various recruitment strategies for the purpose of improving an existing framework for team management. My additions allow robots to more actively acquire new teams members and assign tasks among other robots on a team without the intervention of a team leader. I evaluate this framework in simulated post-disaster environments where the risk of robot loss is high and communications are often unreliable. My results show that in many scenarios, active recruitment strategies provide signicant performance benefits. |
| Humanoid robots with many degrees of freedom have an enormous range of possible motions. To be able to move in complex environments and dexterously manipulate objects, humanoid robots must be capable of creating and executing complex sequences of motions to accomplish their tasks. For soccer playing robots (e.g., the participants of RoboCup), the highly dynamic environment require real-time motion planning in spite of the enormous search space of possible motions. In this research, we propose a practical solution to the general movers problem in the context of motion planning for robots. The proposed robot motion planner uses a sample-based tree planner combined with an incremental simulator that models not only collisions, but also the dynamics of the motion. Thus it can ensure that the robot will be dynamically stable while executing the motion. The effectiveness of the robot motion planner is demonstrated both in simulation and on a real robot, using a variation of the Rapidly Exploring Random Tree (RRT) type of motion planner. The results of our empirical evaluation show that CONNECT works better than EXTEND versions of the RRT algorithms in simple domains, but that this advantage disappears in more obstacle-filled environments. The evaluation also shows that our motion planning system is able to find and execute complex motion plans for a small humanoid robot. |
| This paper describes the motivation for the development of the HuroCup competition and follows the rule development from its inaugural competition from 2002 to 2015. The history of HuroCup is broken down into its growing phase (2002-2006), a time of explosive growth (2007-2011) and current times. This paper describes the main research focus of HuroCup, the multi-event humanoid robot competition: (a) active balancing, (b) complex motion planning, and (c) human-robot interaction and shows how the various HuroCup events relate to those research topics. This paper concludes with some medium- and long-term goals of the rule development for HuroCup. |
| Using teams of autonomous, heterogeneous robots to operate in dangerous environments means increased cost-effectiveness and the ability to spread skills among team members. The high risk of loss in these domains is a challenge to team management. Teams must be able to recruit the help of other robots in the environment, while balancing searching with performing immediately useful work. This paper describes additions to a framework for dynamic team management in dangerous domains in order to support various levels of active search for useful agents while balancing useful work in the domain. |
| Much work on coalition formation and maintenance exists from the standpoint of abstract agents. This has not yet translated well to robot teams, however: most multi-robot research has focused on pre-formed teams, with little attention to team formation and maintenance. This means solutions fail in challenging environments where equipment is easily lost, such as urban search and rescue. This paper describes a framework for coordinating a changing collection of heterogeneous robots in complex and dynamic environments such as disaster zones. The framework allows a team to reshape to compensate for lost or failed robots, including adding newly-encountered robots or additions from other teams, and also allows new teams to be formed dynamically. The framework also includes provisions for task discovery and assignment, under the conditions of changing team membership. We evaluate this framework through an implementation where robots perform exploration in order to locate victims in a simulated disaster environment. |
| Prior work has suggested that tangible user interfaces (TUIs) may be more natural and easier to learn than conventional interfaces. We present study results that suggest an opposite effect: we found user performance, satisfaction, and ease of use to be higher with more common-place input methods (keyboard and joystick) than two novel TUIs. |
| Integrating computer vision into a robotic system can provide a closed-loop controlled platform that increases the robustness of a robot's motion. This integration is also known as visual servo control or visual servoing. Visual servoing of a robot manipulator in real-time presents complex engineering problems with respect to both control and image processing particularly when we want the robot arm to perform complicated tasks such as portrait drawing. In my research, the implementation of torque feedback control and Image-based Visual Servoing (IBVS) approaches are proposed to improve previous open-loop portrait drawing tasks performed by Betty, a humanoid robot in the Autonomous Agent Lab, University of Manitoba. The implementations and evaluations of hardware, software and kinematic models are discussed in this document. I examined the problem of estimating ideal edges joining points in a pixel reduction image for an existing point-to-point portrait drawing humanoid robot, Betty. To solve this line drawing problem, two automatic sketch generators are presented. First, a modied Theta-graph, called Furthest Neighbour Theta-graph (FNTG). Second, an extension of the Edge Drawing Lines algorithm (EDLines), called Extended Edge Drawing Lines (eEDLines). The results show that the number of edges in the resulting drawing is signicantly reduced without degrading the detail of the output image. The other objective of this research is to propose the extension of the drawing robot project to further develop a robust visual servoing system for Betty to correct any drawing deviation in real-time as a human does. This is achieved by investigating and developing robust feature (lines and shading) extraction approaches for real-time feature tracking of IBVS in combination with adequate torque feedback in the drawing task. |
| Robots moving about in complex environments must be capable of determining and performing difficult motion sequences to accomplish tasks. As the tasks become more complicated, robots with greater dexterity are required. An increase in the number of degrees of freedom and a desire for autonomy in uncertain environments with real-time requirements leaves much room for improvement in the current popular robot motion planning algorithms. In this thesis, state of the art robot motion planning techniques are surveyed. A solution to the general movers problem in the context of motion planning for robots is presented. The proposed robot motion planner solves the general movers problem using a sample-based tree planner combined with an incremental simulator. The robot motion planner is demonstrated both in simulation and the real world. Experiments are conducted and the results analyzed. Based on the results, methods for tuning the robot motion planner to improve the performance are proposed. |
| Basic walking gaits are a common building block for many activities in humanoid robotics, such as robotic soccer. The nature of the walking surface itself also has a strong affect on an appropriate gait. Much work is currently underway in improving humanoid walking gaits by dealing with sloping, debris-filled, or otherwise unstable surfaces. Travel on slippery surfaces such as ice, for example, greatly increases the potential speed of a human, but reduces stability. Humans can compensate for this lack of stability through the adaptation of footwear such as skates, and the development of gaits that allow fast but controlled travel on such footwear. This paper describes the development of a gait to allow a small humanoid robot to propel itself on ice skates across a smooth surface, and includes work with both ice skates and inline skates. The new gait described in this paper relies entirely on motion in the frontal plane to propel the robot, and allows the robot to traverse indoor and outdoor ice surfaces more stably than a classic inverted pendulum-based walking gait when using the same skates. This work is demonstrated using Jennifer, a modified Robotis DARwIn-OP humanoid robot with 20 degrees of freedom. |
| This paper describes a simple and effective system for counting the number of objects that move through a region of interest. In this work, we focus on the problem of counting the number of people that are entering or leaving an event. We design a pedestrian counting system that uses a dense optical flow field to calculate the integral of the optical flow in a video sequence. The only parameter used in the system is the the estimated integral flow for a single person. This parameter can be easily calculated from a short training sequence. Empirical evaluations show that the system is able to provide accurate estimates even for complex sequences in real-time. The described system won 2nd place in the pedestrian counting computer vision competition at the IEA-AIE 2014 conference. |
| This paper describes three human-inspired approaches to balancing in highly dynamic environments. In this particular work, we focus on balancing on a Bongo board - a common device used for human balance and coordination training - as an example of a highly dynamic environment. The three approaches were developed to overcome limitations in robot hardware. Starting with an approach based around a simple PD controller for the centre of gravity, we then move to a hybrid control mechanism that uses a predictive control scheme to overcome limitation in sensor sensitivity, noise, latency, and jitter. Our third control approach attempts to maintain a dynamically stable limit cycle rather than a static equilibrium point, in order to overcome limitations in the speed of the actuators. The humanoid robot Jimmy is now able to balance for several seconds and can compensate for external disturbances (e.g., the Bongo board hitting the table). A video of the robot Jimmy balancing on the Bongo board can be found at http://www.youtube.com/watch?v=ia2ZYqqF-lw . |
| This paper describes a novel system for enabling a humanoid robot to balance on highly dynamic terrain using fuzzy logic. We evaluate this system by programming Jimmy, a small, humanoid DARwIn-OP robot, to balance on a bongo board - a simple apparatus consisting of a deck resting on a free-rolling wheel - using our novel fuzzy logic system and a PID controller based on our previous work (Baltes et al. [1]). Both control algorithms are tested using two different control policies: "do the shake", wherein the robot attempts to keep the bongo board's deck level by CoM manipulation; and "Let's Sway", wherein the robot pumps its legs up and down at regular intervals in an attempt to induce a state of dynamic stability to the system. Our experiments show that fuzzy logic control is equally capable to PID control for controlling a bongo board system. |
| In this paper we introduce a torque feedback control (TFC) model to estimate pressure of the hand on a 4-DOF robotic arm of Betty, a humanoid robot. Based on several preliminary experiments of different stroke patterns, we measured and analysed the torque replies of Betty's servos in order to model the torque feedback. We developed a robust humanoid system to create sketch-like drawing with limited hardware which has no force sensor but basic torque feedback from servos to estimate the pressure applied on a drawing pad. We investigated the efficiency of different stroke patterns. The experimental results indicate that the TFC model successfully corrected the errors during the drawing task. |
| Control of a servomotor is a challenging real-time problem. The embedded microcontroller is responsible for fast and precise actuation of the motor shaft, and must handle communication with a master controller as well. If additional tasks such as temperature monitoring are desirable, they must take place often enough to be useful, but not so frequently that they interfere with the operation of the servo. Since microcontrollers have limited multi-tasking capabilities, it becomes difficult to perform all of these tasks at once. It was our goal to create servo firmware with high communication speeds for humanoid robots, and our solution is generalizable to non-humanoid motor control as well. In this paper, we present an event-driven operating system for the Robotis AX-12 servomotor. By using interrupts to drive functionality that would otherwise require polling, our operating system meets the real-time constraints associated with controlling a servomotor. |
| The volume consists of selected quality papers from three international conferences. The volume is intended to provide readers with the recent technical progress in robotics, human-robot interactions, cooperative robotics, and related fields. The volume contains 38 papers from the 112 contributed papers at the 16th FIRA RoboWorld congress, in Shah Alam, Malaysia, August 26-27, 2013. |
| New methods of attacking networks are being invented at an alarming rate, and pure signature detection cannot keep up. The ability of intrusion detection systems to generalize to new attacks based on behavior is of increasing value. Machine Learning algorithms have been successfully applied to intrusion and fraud detection; however the time and accuracy tradeoffs between algorithms are not always considered when faced with such a broad range of choices. This thesis explores the time and accuracy metrics of a wide variety of machine learning algorithms, using a purpose-built supervised learning dataset. Topics covered include dataset dimensionality reduction through pre-processing techniques, training and testing times, classication accuracy, and performance tradeoffs. Further, ensemble learning and meta-classication are used to explore combinations of the algorithms and derived data sets, to examine the effects of homogeneous and heterogeneous aggregations. The results of this research are presented with observations and guidelines for choosing learning schemes in this domain. |
| In many robotics tasks, it is advantageous for robots to assemble into formations. In many of these applications, it is useful for the robots to have differing capabilities (i.e., be heterogeneous). These differences are task specic, but the most obvious differences lie in sensing and locomotion capabilities. Groups of robots may also have only imperfect or partially-known information about one another as well. One key piece of information that robots often lack is how many other robots are in the environment. This thesis describes a method for formation control that allows heterogeneous robots with limited information to dynamically assemble into formations, merge smaller formations together, and correct errors that may arise in the formation. The approach is shown to be scalable and robust against robot failure, and is evaluated in multiple simulated environments. |
| This paper is part of our ongoing research in balancing of humanoid robots in highly dynamic environments. We focus on balancing of a humanoid robot on a Bongo board. One of the problems with balancing in highly dynamic environments such as the Bongo board is the fact that any control algorithm needs to overcome the inherent latency and jitter in the sensors as well as in the actuators of the robot, since it has very little time to react to disturbances. The sensor filter method described in this paper allows the robot Jimmy (a DARwIn-OP robot) to balance for several seconds on a Bongo board. A video of the robot Jimmy balancing on the Bongo board can be found at http://www.youtube.com/watch?v=ia2ZYqqF-lw . |
| This paper describes our latest humanoid robots: Jennifer, Jimmy, and Jeff. These robots are customised DARwIn-OP model robots; we have written our own image processing and localisation algorithms, and modied the robots' hardware through the addition of single-DOF grippers and FSR sensors mounted in the feet. We have used these robots successfully in several competitions over the last two years, including FIRA and IRC. This will be our first time using them at RoboCup. |
| This paper describes the most popular options that are available developers of intelligent humanoid robots and their advantages and disadvantages. There has never been a wider range of affordable and practical solutions for the developers of intelligent humanoid robots. This paper lists the suitability of the most common options such as microcontrollers, ARM based embedded boards, and x86 based small PCs and how well the meet different design constraints. Using an example from low level vision processing, the paper highlights common pitfalls when including these more complex embedded systems in their robot. |
| Though much work on coalition formation and maintenance exists from the standpoint of abstract agents, this has not yet translated well to the realm of physically grounded robots. Most multi-robot research has focused on pre-formed teams, with little attention to the formation and maintenance of the team itself. While this is plausible in forgiving domains, it fails rapidly in challenging environments where equipment is lost or broken easily, such as urban search and rescue. This paper describes the team management elements of a framework for coordinating a changing collection of heterogeneous robots operating in complex and dynamic environments such as disaster zones. Our framework helps a team to reshape itself to compensate for lost or failed robots, including adding newly-encountered robots or additions from other teams, and also allows new teams to be formed dynamically starting from an individual robot. We evaluate our framework through an example implementation where robots perform exploration in order to locate victims in a simulated disaster environment. |
| This paper describes the task management elements of a framework for coordinating a changing collection of heterogeneous robots operating in complex and dynamic environments such as disaster zones. Our framework allows a team to discover and distribute tasks among its members, in a distributed fashion, where the structure of the team is under regular change. Robots may become lost or fail at any time, and new equipment may arrive at any time. We evaluate our framework through an example implementation where robots perform exploration and search for victims in a simulated disaster environment. |
| The purpose of this paper is to utilize Field Programmable Gate Array (FPGA) to perform stereo vision distance detection. However, the stereo vision built by two cameras makes memory space lacking and image process slow under the constraints of FPGA application. In this paper, efficient memory space allocation and hardware calculation for stereo vision detection built in a System on a Programmable Chip (SOPC) based on FPGA are proposed. The hardware for stereo vision distance calculation includes the processing for the images of gray, binary, dilation, erosion, etc, and image geometry method for the vision distance through information of phase differences between two lenses. In addition, the simple hardware algorithm of background image subtraction to capture an object image from a series of image frames is also included. The totally hardware to perform stereo vision distance detection is difficult implementation, but firmware (some calculation in software) is flexible and quick to develop. Therefore, the performance of stereo vision distance detection according to hardware and firmware is compared. Finally, the distance calculation between objects and the lenses is demonstrated by practical experiments. |
| In many multi-robot tasks, it is advantageous for robots to assemble into formations. In many of these applications, it is useful for ering capabilities (i.e., be heterogeneous) in terms of perception and locomotion abilities. In real world settings, groups of robots may also have only imperfect or partially-known information about one another as well. Together, heterogeneity and imperfect knowledge provide signicant challenges to creating and maintaining formations. This paper describes a method for formation control that allows heterogeneous robots with limited information (no known population size, shared coordinates, or predened relationships) to dynamically assemble into formation, merge smaller formations together, and correct errors that may arise in the formation. Using a simulation, we have shown our approach to be scalable and robust against robot failure. |
| This research presents a novel technique termed Multi-Agent Malicious Behaviour Detection. The goal of Multi-Agent Malicious Behaviour Detection is to provide infrastructure to allow for the detection and observation of malicious multi-agent systems in computer network environments. This research explores combinations of machine learning techniques and fuses them with a multi-agent approach to malicious behaviour detection that effectively blends human expertise from network defenders with modern articial intelligence. Detection in this approach focuses on identifying multiple distributed malicious software agents cooperating to achieve a malicious goal in a complex dynamic environment. A signicant portion of this approach involves developing Multi-Agent Malicious Behaviour Detection Agents capable of supporting interaction with malicious multi-agent systems, while providing network defenders a mechanism for improving detection capability through interaction with the Multi-Agent Malicious Behaviour Detection system. Success of the approach depends on the Multi-Agent Malicious Behaviour Detection system's capability to adapt to evolving malicious multi-agent system communications, even as the malicious software agents in network environments vary in their degree of autonomy and intelligence. The Multi-Agent Malicious Behaviour Detection system aims to take advantage of detectable behaviours that individual malicious software agents as well as malicious multi-agent systems are likely to exhibit, including: beaconing, denying, propagating, ex-filtrating, updating and mimicking. This thesis research involves the design of this framework, its implementation into a working tool, and its evaluation using network data generated by an enterprise class network appliance to simulate both a standard educational network and an educational network containing malware traffic. |
| Imitation learning enables a learner to improve its abilities by observing others. Most robotic imitation learning systems only learn from demonstrators that are similar physically and in terms of skill level. In order to employ imitation learning in a heterogeneous multi-agent environment, we must consider both differences in skill, and physical differences (physiology, size). This paper describes an approach to imitation learning from heterogeneous demonstrators, using global vision. It supports learning from physiologically different demonstrators (wheeled and legged, of various sizes), and self-adapts to demonstrators with varying levels of skill. The latter allows different parts of a task to be learned from different individuals (that is, worthwhile parts of a task can still be learned from a poorly-performing demonstrator). We assume the imitator has no initial knowledge of the observable effects of its own actions, and train a set of Hidden Markov Models create an understanding of the imitator's own abilities. We then use a combination of tracking sequences of primitives and predicting future primitives from existing combinations using forward models to learn abstract behaviours from demonstrations. This approach is evaluated using a group of heterogeneous robots that have been previously used in RoboCup soccer competitions. |
| We examine the problem of estimating ideal edges joining points in a pixel reduction image for an existing point-to-point portrait drawing humanoid robot, Betty. To solve this line drawing problem we present a modified Theta-graph, called Furthest Neighbour Theta-graph, which we show is computable in O(n(log n)/theta) time, where theta is a fixed angle in the graph's definition. Our results show that the number of edges in the resulting drawing is significantly reduced without degrading the detail of the final output image. |
| This thesis describes an automatic evaluation approach for estimating the quality of stereo displays and vision systems using image features. The method is inspired by the human visual system. Display of stereo images is widely used to enhance the viewing experience of three-dimensional (3D) visual displays and communication systems. Applications are numerous and range from entertainment to more specialized applications such as: 3D visualization and broadcasting, robot tele-operation, object recognition, body exploration, 3D teleconferencing, and therapeutic purposes. Consequently, perceived image quality is important for assessing the performance of 3D imaging applications. There is no doubt that subjective testing (i.e., asking human viewers to rank the quality of stereo images) is the most accurate method for quality evaluation. It reflects true human perception. However, these assessments are time consuming and expensive. Furthermore, they cannot be done in real time. Therefore, the goal of this research is to develop an objective quality evaluation methods (computational models that can automatically predict perceived image quality) correlating well with subjective predictions that are required in the field of quality assessment. I believe that the perceived distortion and disparity of any stereoscopic display are strongly dependent on local features, such as edge (non-uniform) and non-edge (uniform) areas. Therefore, in this research, I propose a No-Reference (NR) objective quality assessment for coded stereoscopic images based on segmented local features of artifacts and disparity. Local feature information such as edge and non-edge area based relative disparity estimation, as well as the blockiness, blur, and the zero-crossing within the block of images, are evaluated in this method. A block-based edge dissimilarity approach is used for disparity estimation. I use the Toyama stereo images database to evaluate the performance and to compare it with other approaches both qualitatively and quantitatively. |
| Using teams of robots to complete a task provides a number of advantages over the use of a single robot. Multiple robots are able to complete tasks faster, and provide redundancy in case of equipment failure or loss. Teams of robots with different capabilities and physiologies are benecial because they allow a team to provide a high level of overall functionality while striking a balance between the cost and complexity of the robots. Previous work tends to focus on the use of pre-formed teams of robots,with little attention to the formation and maintenance of the team itself. An environment such as a disaster zone presents numerous challenges to robotic operation, and it can be expected that the nature of a team will change due to, for example, malfunctions and the introduction of replacement equipment. I developed a framework to support the maintenance of teams of heterogeneous robots operating in complex and dynamic environments such as disaster zones. Given an established team, my work also facilitates the discovery of work to be done during the team's mission and its subsequent assignment to members of the team in a distributed fashion. I evaluated my framework through the development of an example implementation where robots perform exploration in order to locate victims in a simulated disaster environment. |
| In the last two decades various intelligent robotics competitions have become very popular. Arguably the most well-known of these are the robotic soccer competitions. In addition to their value in attracting media and capturing the minds of the general public, these competitions also provide benchmark problems for various robotics and artificial intelligence (AI) technologies. As with any benchmark, care must be taken that the benchmark does not introduce unwarranted biases. This paper critically evaluates the AI contributions made by various robotic competitions on AI research. |
| At the heart of every stereo vision algorithm is a solution to the matching problem - the problem of finding points in the right and left image that correspond to a single point in the real world. Applying assumptions regarding the epipolar rectification and color similarity between two frames is often not possible for real-world image capture systems, like those used rescue robots. More flexible and robust feature descriptors are necessary to operate under harsh real world conditions. This paper compares the accuracy of disparity images generated using local features including points, line segments, and regions, as well as a global framework implemented using loopy belief propagation. This paper will introduce two new algorithms for stereo matching using line segments and regions, as well as several support structures that optimize the algorithms performance and accuracy. Since few complete frameworks exist for line segment and region features, new algorithms that were developed during the research for this paper will be outlined and evaluated. The comparison includes quantitative evaluation using the Middlebury stereo image pairs and qualitative evaluation using images from a less structured environment. Since this evaluation is grounded in practical environments, processing time is a significant constraint which will be evaluated for each algorithm. This paper will show that line segment-based stereo vision with a gradient descriptor achieves at least a 10% better accuracy than all other methods used in this evaluation while maintaining the low runtime associated with local feature based stereo vision. |
| This demonstration shows a team of small humanoid robots traverse an environment through a set of obstacles. The robots' brain are implemented using mobile phones for vision, balance, and processing. The robots use particle filters to localize themselves and to map the environment. A frontier-based exploration algorithm is used to direct the robots to overcome obstacles and to explore all regions of the environment. |
| To develop an efficient robotic system is always a challenge, in particular if the cost of the system is also an important factor. This paper presents an overview of development of our 10 degree of freedom humanoid, Betty. Reducing the cost of the system requires optimization of all aspects to retain its flexibility, reliability and performance at minimum cost. During the design and development of Betty, we only use low cost hardware and open source software to address both cost and performance issues. We develop a real-time kernel optimized to control servo positions and read back servo data. Parameters of this kernel are controlled by a PID controller resulting in an adaptive real-time kernel. After solving the forward and inverse kinematics of our robot, we implemented portrait drawing as a sample application showing the performance of our system. |
| Threaded C is a meta-language that is based on C, but is annotated with thread, monitor thread, and semaphore markup. Threaded C uses the runtime provided by the Freezer OS, a small, memory-efficient embedded kernel. The combination of Freezer OS and Threaded C allows the simple expression of common control problems in robotics. The system is geared especially towards robotics education, as it matches the mental map that children have of how control structures should work. |
| This paper describes the implementation of a fast and accurate gesture recognition system. Image sequences are used to train a standard SVM to recognize Yes, No, and Neutral gestures from different users. We show that our system is able to detect facial gestures with more than 80% accuracy from even small input images. |
| Formations are often seen in nature, and bring many benefits for the group as a whole. They can allow a group to explore a large area more effectively, can ease movement of the group through the environment, and can increase group perceptual coverage and increase defensive capabilities, for example. The benefits of any particular formation vary and are obtained from the structure the formation provides. Robotic formations can have similar applications. To date, the techniques used and formations employed in robotic applications are significantly simpler than those seen in nature. Current techniques often require some level of global knowledge, central processing or other unrealistic assumptions. We seek to develop a formation control technique that has as few of these limitations as possible. Each agent under our approach has only local knowledge of the environment, uses no broadcast communication, and can communicate only over a limited range. Formations are achieved by organizing agents into a graph structure, where agents occupying the vertices take on the role of maintaining an appropriate number of agents on each edge, thus preserving the formation's shape and scale. We do not assume a known or static population: the evolving formation acts as a physical data structure to assist in placing and rearranging agents as the population changes. This approach does not require a global coordinate system, fixed positions within the formation, or any single lead agent. All agents within our approach are peers, and any can adopt any role within the formation. |
| This paper investigates the efficiency of the real-time embedded system in our humanoid robot, Betty. In this paper we only discuss the upper body of Betty. Based on several experiments of different queue data structures, communication protocols and PID controller implementations, we measured and analysed the latencies and jitters of Betty's responses. The experimental results indicate the best configuration to optimise the performance of Betty's Control Program. |
| This volume is a selection of papers of six international conferences that are held under the umbrella of the 12th FIRA RoboWorld congress, in Incheon, Korea, August 16-18, 2009. From the 115 contributed papers 44 papers are included in the volume, which is organized into 6 sections: humanoid robotics, human robot interaction, education and entertainment, cooperative robotics, robotic system design, and learning, optimization, communication. The volume is intended to provide readers with the recent technical progresses in robotics, human robot interactions, cooperative robotics and the related fields. |
| The volume consists of selected quality papers from six international conferences that are held under the umbrella of the 12th FIRA RoboWorld congress, in Incheon, Korea, August 16-18, 2009. 31 papers from 115 contributed papers at the FIRA RoboWorld Congress, held in Incheon, Korea, August 16-18, were included in the volume. It is organized in 7 sections: emotions and behaviour, human robot interaction, biped humanoid robotics, localization, path planning, obstacle avoidance, control, communication, terrain mapping and classification. The volume is intended to provide readers with the recent technical progresses in robotics, human robot interactions, cooperative robotics and the related fields. |
| Imitation learning enables a learner to expand its own skill set with behaviours that it observes from others. Most imitation learning systems learn from a single class of demonstrators, and often only a single demonstrator. Such approaches are limited, however: in the real world, people have varying levels of skills and different approaches to solving problems, and learning from only one demonstrator would be a very limited perspective. In the context of robots, very different physiologies make learning from many types of demonstrators equally important. A wheeled robot may watch a humanoid perform a task, for example, and yet not be able to perfectly approximate its movements (e.g. stepping over small obstacles). This thesis describes an approach to learning a task by observing demonstrations performed by multiple heterogeneous robots using global (overhead) vision, incorporating demonstrators that are different in size, physiology (wheeled vs. legged), and skill level. The imitator evaluates demonstrators relative to each other, which gives it the ability to weigh its learning towards the more skilled demonstrators. I assume the imitator has no initial knowledge of the observable effects of its own actions, and begin by training a set of Hidden Markov Models (HMMs) to map observations to actions. These HMMs provide a low-level basis for interpreting the observations of others. I then use forward models to construct more abstract behaviours that bridge the differences between highly heterogeneous agents. This approach is evaluated in the domain of robotic soccer, where it is found that the imitator can weigh its learning towards skilled demonstrators regardless of physiology. |
| At the heart of every stereo vision algorithm is a solution to the matching problem - the problem of finding points in the right and left image that correspond to a single point in the real world. Applying assumptions regarding the epipolar rectification and color similarity between two frames is often not possible for real-world image capture systems, like those used in urban search and rescue robots. More flexible and robust feature descriptors are necessary to operate under harsh real world conditions. This thesis compares the accuracy of disparity images generated using local features including points, line segments, and regions, as well as a global framework implemented using loopy belief propagation. This thesis will introduce two new algorithms for stereo matching using line segments and regions, as well as several support structures that optimize the algorithms performance and accuracy. Since few complete frameworks exist for line segment and region features, new algorithms that were developed during the research for this thesis will be outlined and evaluated. The comparison includes quantitative evaluation using the Middlebury stereo image pairs and qualitative evaluation using images from a less structured environment. Since this evaluation is grounded in urban search and rescue robotics, processing time is a significant constraint which will be evaluated for each algorithm. This thesis will show that line segment-based stereo vision with a gradient descriptor achieves at least a 10% better accuracy than all other methods used in this evaluation while maintaining the low runtime associated with local feature based stereo vision. |
| While the robots that most quickly come to mind to the general public are those with the most elaborate features and movements, those that are most useful in advancing the state of the art in artificial intelligence (AI) are very different. Minimalist robots are inexpensive and therefore more broadly available for research and educational purposes, but also force the researcher to rely on good, adaptable solutions to hard AI problems rather than relying on expensive specialized hardware that will only work under strict conditions. This chapter describes our work in minimalist humanoid robots, focussing mainly on Tao-Pie-Pie, a robot that competed successfully in numerous RoboCup and FIRA competitions. The chapter describes our motivations in designing minimalist robots and our rationale for working with humanoid robots, and describes the development of Tao-Pie-Pie, including contrasting this robot with other work and developing its walking gait and balancing reflexes. We then describe some issues in evaluating humanoid robots, and describe ongoing work. |
| For a mobile robot to be able to communicate usefully with others in a group, the references it makes to points in space must be grounded in concepts that are shared among the group. In the past it has been common to hand-construct a complete set of such groundings, either by individual enumeration or by enforcement of a common coordinate system and origin among all team members. Such assumptions remove the ability to add new robots with no knowledge of the environment in an ad hoc manner, and also require knowledge which may not be available. In an urban search and rescue (USAR) setting, for example, robots may be released into rubble from a collapsed building with no shared starting point for an origin, under conditions where GPS reception is disrupted. Preconstructed groundings are also anthropocentric in that they are a best guess by humans as to what is useful from their perspective, and may be nothing like what robotic agents would come up with on their own. This chapter describes the an approach that allows a group of robotic agents to develop consistent shared groundings for useful locations in an environment over time, using only local communication and interaction. This approach is thus suitable for domains in which broadcast communication may be sporadic, such as USAR, or jammed, such as military applications. The evaluation of this approach, which compares several different grounding techniques, shows that a consistent set of shared groundings can be developed effectively by a team of robots over time using only local interactions, and that these improve the effectiveness of communication in a multi-robot setting. |
| Using robots as part of any curriculum requires careful management of the significant complexity that physical embodiment introduces. Students need to be made aware of this complexity without being overwhelmed by it, and navigating students through this complexity is the biggest challenge faced by an instructor. Achieving this requires a framework that allows complexity to be introduced in stages, as students' abilities improve. Such a framework should also be flexible enough to provide a range of application environments that can grow with student sophistication, and be able to quickly change between applications. It should be portable and maintainable, and require a minimum of overhead to manage in a classroom. Finally, the framework should provide repeatability and control for evaluating the students' work, as well as for performing research. In this paper, we discuss the advantages of a mixed reality approach to applying robotics to education in order to accomplish these challenges. We introduce a framework for managing mixed reality in the classroom, and discuss our experiences with using this framework for teaching robotics and AI. |
| While embodied robotic applications have been a strong influence on moving artificial intelligence toward focussing on broad, robust solutions that operate in the real world, evaluating such systems remains difficult. Competition-based evaluation, using common challenge problems, is one of the major methods for comparing AI systems employing robotic embodiment. Competitions unfortunately tend to influence the creation of specific solutions that exploit particular rules rather than the broad and robust techniques that are hoped for, however, and physical embodiment in the real world also creates difficulties in control and repeatability. In this paper we discuss the positive and negative influences of competitions as a means of evaluating AI systems, and present recent work designed to improve such evaluations. We describe how improved control and repeatability can be achieved with mixed reality applications for challenge problems, and how competitions themselves can encourage breadth and robustness, using our rules for the FIRA HuroCup as an example. |
| This paper describes our first teen sized humanoid robot Archie. This robot has been developed in conjunction with Prof. Kopacek's lab from the Technical University of Vienna. Archie uses brushless motors and harmonic gears with a novel approach to position encoding. Based on our previous experience with small humanoid robots, we developed software to create, store, and play back motions as well as control methods which automatically balance the robot using feedback from an internal measurement unit (IMU). |
| This paper describes two major humanoid robotic competitions: the RoboCup Humanoid League and the FIRA HuroCup, which were both introduced in 2002. Even though both competitions have the final goal of creating a team of robots that can compete with humans in a soccer match, the two associateions focused on different intermediate goals. RoboCup forucsed on interesting soccer matches between teams of robots as soon as possible, whereas HuroCup emphasizes versatility and robustness through a series of 8 events for a single robot. |
| Since the burst of the dot-com bubble in 2000, computer science has seen a significant decrease in enrollment in universities across North America. While this has been well-publicized in the media in the United States, Canada's numbers in this regard have been significantly worse. Within Canada, however, the Department of Computer Science at the University of Manitoba has been relatively fortunate: while a noticeable decrease has occurred, it is statistically much less than has occurred across Canada and the U.S. There are a number of reasons for this, one of which is the use of artificial intelligence (AI), and robotics in particular, as a tool for student recruitment and retention. In this paper, we examine enrollment trends of our university compared to the rest of the continent, discuss some of the reasons behind these trends, and describe how we use AI, and robotics in particular, as tools to attract and retain computer science students. |
| A solution to the SLAM problem using multiple homogeneous humanoid robots with limited processing power, noisy sensor data, and inconsistent locomotion is described and implemented on two real humanoid robots. The solution uses particle filters and the concept of frontier-based exploration. |
| For any practical purpose, humanoid robots must be able to maneuver over a variety of terrains, at different speeds and with varying gaits. Sensors must be used to make sense of the surrounding environment, enabling robots to balance as they move. Though motion and pressure sensors exist, their input is just beginning to be used to dynamically balance gaits, and they are often used in conjunction with other sensors, limiting the knowledge obtained about each sensor. In this thesis, I implement three simple balancing algorithms on a robot equipped solely with an accelerometer to study the utility of simple algorithms and a single sensor in balancing. The basic threshold algorithm proves the most effective overall. The algorithms are able to balance for simple tasks, but as the balancing required becomes more complex (i.e., controlling multiple joints over uneven terrain), the need for more sophisticated algorithms becomes apparent. |
| Imitation learning is a powerful mechanism used by humans and other creatures. In imitation learning, the actions of others form the basis for desirable behaviour, and an imitation learner must be able to recognize the outcomes of the actions of others, understand how these relate to its own abilities, and ultimately duplicate the final outcome of a series of actions. We are interested in supporting this type of learning in general populations of robots, where a two important complications arise. First, physical variation between demonstrator and learner may require the learner to carry out different action(s) from the demonstrator to achieve the same results. Second, since demonstrators' skills may differ as much as their physiology, agents must be able to compare the demonstrations of a number of different individuals, in order to give greater weight to better demonstrators. Being able to integrate multiple demonstrations from different demonstrators allows a learner to deal with these problems as well as encouraging the creation of more general behaviours, rather than simply mimicking the actions of a single agent with no ability to generalize. In this paper we describe an approach to imitation learning based on global vision, which deals with these problems. |
| Teaching robotics to undergraduate students requires a course framework that allows students to learn about robotics in stages, without being overwhelmed with details. Such a framework must also provide the students with a motivating application environment that challenges them to apply what they have learned. Robotics competitions have proven to be an excellent method for motivating students, so the framework should be portable and robust enough to be used for competitions, and flexible enough to provide a range of environments that can become more challenging as students become more adept. Finally, the framework should provide repeatability and control for evaluating the student�s work, as well as for performing research. In this paper, we overview a mixed reality approach that meets these criteria, and describe its use in an advanced undergraduate course. |
| This paper advocates the use of global vision as a tool for increasing the effectiveness of robotics education, and describes the design and functionality of advanced global vision systems used in our own programs. Our experiences with using global vision as a basis for teaching robotics and AI have led us to use this as a standard method for teaching undergraduates. Our recent vision systems (DORAEMON and ERGO) have consistently been improved to perform accurately and robustly over a wide range of applications. DORAEMON uses a sophisticated camera calibration method and colour model to remove the need for an overhead view of the world. ERGO minimized the use of colour information to provide more robust object recognition under varying lighting scenarios. Most recently, these video servers have been used by undergraduates to develop autonomous robots for a mixed virtual/physical world. |
| For a mobile robot to be able to communicate usefully with others, the symbols it uses to communicate must be associated with (grounded to) physical entities in the environment. While it is common practice to hand-construct such groundings, this does not scale to large problems. In particular, when communicating about useful locations in the environment, there are a large number of potential groundings, even for a relatively simple task such as navigation. The research goal of this thesis was to design, implement, and evaluate an approach that allows a group of robotic agents to develop consistent shared groundings for locations in an environment over time. The approach was implemented in a multi-agent robot simulator and experiments were run in domains of varying size and complexity, and with different robot populations. A number of parameters involved in developing shared groundings were also varied. The results of these experiments illustrate that not only can such shared groundings be developed over time, but that these groundings will improve the effectiveness of communication and ultimately the performance of tasks that require communication. |
| Robotic agents in dynamic environments must sometimes navigate using only their local perceptions. In complex environments, features such as terrain undulation, geometrically complex barriers, and similar obstacles form local maxima and minima that can trap and hinder agents using reactive navigation. Moreover, agents navigating in a purely reactive fashion forget their past discoveries quickly. Preserving this knowledge usually requires that each agent construct a detailed world model as it explores or be forced to rediscover desired goals each time. Explicit communication can also be required to share discoveries and coordinate actions. The cost of explicit communication can be substantial, however, making it desirable to avoid its use in many domains. Accordingly, in this paper we present a method of cooperative trail making that allows a team of agents using reactive navigation to assist one another in their explorations through implicit (stigmergic) communication. |
| A fully autonomous robot needs a flexible map to solve frequent change of robot situations and/or tasks. In this paper, based on the second type of fuzzy modeling, fuzzy potential energy (FPE) is proposed to build a map that facilitates planning robot tasks for real paths. Three rules for making use of FPEs are derived to ground the basic ideas of building a map for task navigation. How the FPE performs robot navigation is explained by its gradient directions and shown by its gradient trajectories. To code qualitative information into quantity, the proposed FPE provides a way to quickly find a path for conducting the designated task or solving a robot under an embarrassing situation. This paper pioneers novel design and application of fuzzy modeling for a special map that exploits innovation usage of task navigation for real paths. Actually, visibility graphs based on the knowledge of human experts are employed to build FPE maps for navigation. To emphasize the idea of the created FPE, seven remarks direct the roadmap towards being a utility tool for robot navigation. Three illustrative examples, containing three spatial patterns, doors, corridors and cul-de-sacs, are also included. This paper paves the way to create ideas of intelligent navigation for further developments. |
| Stereo vision for small mobile robots is a challenging problem, particularly when employing embedded systems with limited processing power. However, it holds the promise of greatly increasing the localization, mapping, and navigation ability of mobile robots. To help in scene understanding, objects in the field of vision must be extracted and represented in a fashion useful to the system. At the same time, methods must be in place for dealing with the large volume of data that stereo vision produces, in order that a practical frame rate may be obtained. We have been working on stereo vision as the sole form of perception for Urban Search and Rescue (USAR) domains over the last three years. Recently, we have extended our work to include domains with more complex human robot interactions. Our entry in the 2006 AAAI Robotics competition embodies these ideas. |
| The goal of this thesis is to develop an intuitive, adaptive, and flexible architecture for controlling intelligent mobile robots. This architecture is a hybrid architecture that combines deliberative planning, reactive control, finite state automata, behaviour trees and uses competition for behaviour selection. This behaviour selection is based on a task manager, which selects behaviours based on approximations of their applicability to the current situation and the expected reward value for performing that behaviour. One important feature of this architecture is that it makes important behavioural information explicit using Extensible Markup Language (XML) [99]. This explicit representation is an important part in making the architecture easy to debug and extend. The utility, intuitiveness and flexibility of this architecture is shown in an evaluation of this architecture against older control programs that lack such explicit behavioural representation. This evaluation was carried out by developing behaviours for several common robotic tasks and demonstrating common problems that arose during the course of this development. |
| It is well known that teams of agents in a multi-agent system often perform better than individual agents working alone. Most research in multi-agent systems has made the assumption that teams are pre-formed, and has focused on improving the performance of the existing teams. There has been far less research done on the process of coalition formation - the process by which agents are grouped into teams that can be successful in a given domain. Addtionally, research that has been done in the area of coalition formation has made several key assumptions that, while making either implementations or analyses easier, are generally not true of more realistic domains. This limits the applicability of current approaches to environments with a high degree of realism. In this thesis I examine existing coalition formation algorithms, enumerate common restrictive assumptions, and propose a new coalition formation algorithm that avoids these assumptions. I will also present an implementation of this new approach, and evaluate it against a baseline implementation in a software simulation. |
| As an increasing number of tasks on the Internet become automated using autonomous agents, it will become increasingly important for these agents to be able to discern which agents can be trusted and which cannot. This is especially true where interacting agents may have divergent goals, an example being Peer to Peer applications. Passing on reputation information about other agents is a strong way to encourage cooperation. This paper points out weaknesses in both a general reputation scheme as well as a framework which was previously proposed. These weaknesses could leave the door open for exploitation by malicious agents. |
| This paper describes the methodology that we used to design and implement balancing and walking gaits for Tao-Pie-Pie, a small 30cm tall humanoid robot. Tao-Pie-Pie is a fully autonomous robot with all power, sensing, and processing done on-board. It is also a minimalistic design with only six degrees of freedom. Nevertheless, its performance is comparable to that of other more complex designs. The paper describes three patterns: (a) a straight walk, (b) a turn on the spot, and (c) a kicking pattern. Sensor feedback is provided by two gyroscopes that provide angular velocity in the left-right and forward-backward plane and a CMOS camera providing vision information. The feedback from the gyroscopes is not used to directly control the walking gait, because the signal is noisy and it would be computationally too expensive for the current processor hardware. Instead, coarse feedback from the gyroscopes is used to monitor the transition from one phase of the pattern to the next. This feedback is used to: (a) determine when a phase has completed successfully, and (b) when to change the endpoints of certain phases. Tao-Pie-Pie proved to be a successful design winning a number of honors at international competitions. |
| In 2004, the playing field size of the small sized league was significantly increased, which poses new challenges for all teams. This paper describes extensions to our current video server software Doraemon to deal with these new challenges. It shows that a camera with a side view is a workable alternative to the more expensive approach of using multiple cameras. To illustrate this point, the paper discusses the camera calibration method used in Doraemon as well as an investigation into some common two dimensional interpolation methods (pulse, linear, and cubic B-spline) as well a novel average gradient method. It also proves that (ignoring occluded parts of the playing field) it is possible to construct a realistic top down view of the playing field with a camera that only has a side view of the field. |
| The goal of this research is to develop an intuitive, adaptive, and flexible architecture for intelligent mobile robots. We propose a hybrid architecture that uses behaviour trees and finite state machines. A task manager selects behaviours based on approximations of their applicability and the expected reward of a behaviour. One major feature of this architecture is that important information of the perception, reasoning, and execution parts of the system are made explicit. This information includes parameters (e.g., colour definitions), structural information (e.g., the behaviour tree), and the ability to represent prototypical scenarios. |
| This paper describes methods used in stabilizing the walking gait of Tao-Pie-Pie, a small humanoid robot given rate feedback from two RC gyroscopes. Tao-Pie-Pie is a fully autonomous small humanoid robot (30cm tall). Although Tao-Pie-Pie uses a minimal set of actuators and sensors, it has proven itself in international competitions, winning honors at the RoboCup and HuroSot competitions in 2002 and 2003. The feedback control law is based solely on the rate information from two RC gyroscopes. This alleviates drift problems introduced by integrating the RC gyroscope feedback in the more common position control approaches. |
| Using stereo vision in the field of mapping and localization is an intuitive idea, as demonstrated by the number of animals that have developed the ability. Though it seems logical to use vision, the problem is a very difficult one to solve. It requires the ability to identify objects in the field of view, and classify their relationship to the observer. A procedure for extracting and matching object data using a stereo vision system is introduced, and initial results are provided to demonstrate the potential of this system. |
| In domains such as robotic rescue, robots must plan paths through environments that are complex and dynamic, and in which robots have only incomplete knowledge. This will normally require both diversions from planned paths as well as significant re-planning as events in the domain unfold and new information is acquired. In terms of a representation for path planning, these requirements place significant demands on efficiency and flexibility. This paper describes a method for flexible binary space partitioning designed to serve as a basis for path planning in uncertain dynamic domains such as robotic rescue. This approach is used in the 2003 version of the \kfb\, a robotic rescue team. We describe the algorithm used, make comparisons to related approaches to path planning, and provide an empirical evaluation of an implementation of this approach. |
| Identifying the location and orientation of robots is a significant problem in vision for robotic soccer. Previous approaches use some type of identifying marker system (coloured spots, arrangements of bars) in order to facilitate fast visual identification of individual robots. However, these methods do not scale well to larger teams and require considerable calibration effort. This paper describes an approach that does not require such markers. Instead, the movement history as well and command history are used to identity the robot by employing Bayesian techniques to correlate the commands sent to the robot with the robot's actions in the environment. This approach is implemented in the latest version of our global video server, \Doraemon. |
| Robotic soccer teams using both local and global vision traditionally rely on a set of pre-determined markers (e.g., a group of small colored circles mounted on the top surface of the robot) to provide easy targets for visual analysis in order to determine the team membership, identity, and orientation of robots in the visual field. This approach requires calibration before any competition, as well as agreement in advance on color codes different enough between teams to avoid recognition errors at run-time. Even after extensive calibration, small lighting variations can cause extensive misidentification. In this paper, we examine an alternative approach: training a neural network to recognize the orientation of the robots on a team so that visual tracking can occur in real time without special markers of any kind. This paper describes the design and implementation of such an approach, and shows the results of an empirical evaluation of this approach. |
| This paper describes methods used in stabilizing the walking gait of Tao-Pie-Pie, a small humanoid robot given rate feedback from two RC gyroscopes. Tao-Pie-Pie is a fully autonomous small humanoid robot (30cm tall). Although Tao-Pie-Pie uses a minimal set of actuators and sensors, it has proven itself in international competitions, winning honors at the RoboCup\ and HuroSot\ competitions in 2002 and 2003. The feedback control law is based solely on the rate information from two RC gyroscopes. This alleviates drift problems introduced by integrating the RC gyroscope feedback in the more common position control approaches. |
| This paper describes methods used in stabilizing the walking gait of Tao-Pie-Pie, a small humanoid robot given rate feedback from two RC gyroscopes. Tao-Pie-Pie is a fully autonomous small humanoid robot (30cm tall). Although Tao-Pie-Pie uses a minimal set of actuators and sensors, it has proven itself in international competitions, winning honors at the RoboCup and HuroSot competitions in 2002 and 2003. The feedback control law is based solely on the rate information from two RC gyroscopes. This alleviates drift problems introduced by integrating the RC gyroscope feedback in the more common position control approaches. |
| This paper describes fast demosaicing methods to quadruple the resolution of a CMOS camera. The resulting increase in accuracy in camera calibration and object detection is important for local vision robots, especially those that use computer vision as their only source of information about the state of the world. The paper describes two methods for demosaicing: interpolation and variance demosaicing. A comparison of three sample views is shown to demonstrate the increased resolution and the difference between the interpolation and variance demosaicing methods. Both demosaicing methods work well. Variance demosaicing performs better around edges in the image, but is computationally more expensive. |
| This paper describes a novel approach to detecting orientation and identity of robots using a global vision system. Instead of additional markers, the shape of the robot is used to determine an orientation using a general Hough transform. In addition the movement history as well as the command history are used to calculate the quadrant of the orientation. The identity of the robot is determined by correlating the motion of the robot with the command history. An empirical evaluation shows that the performance of the new video server is at least as good as that of a traditional approach using additional coloured markers. |
| This paper describes the results of an empirical evaluation comparing the performance of five different algorithms in a pursuit and evasion game. The pursuit and evasion game was played using two robots. The task of the pursuer was to catch the other robot (the evader). The algorithms tested were a random player, the optimal player, a genetic algorithm learner, a k-nearest neighbor learner, and a reinforcement learner. The k-nearest neighbor learner performed best overall, but a closer analysis of the results showed that the genetic algorithm suffered from an exploration-exploitation problem. |
| This paper describes a path tracking controller for mobile robots using visual servoing. A highly efficient algorithm suitable for cheap and low power micro-processor is described. The algorithm uses a highly focused search in the image to approximate the offset and gradient of the path. These features are determined solely by a sweep through two rows of the image. An empirical evaluation shows that the algorithm is efficient and robustness. Furthermore, the empirical evaluation investigates the relationship between the average error and the look ahead distance as well as the weighting between the offset and gradient information. |
| This paper describes adaptive path planning, a novel approach to path planning for car-like mobile robots. Instead of creating a new plan from scratch, whenever changes in the environment invalidate the current plan, the adaptive path planner attempts to adapt the old plan to the new situation. The paper proposes an efficient representation for path that is easily amendable to adaptation. Associated with the path planner is a set of repair strategies. These repair strategies are local methods to fix a plan to compensate for object movement in the domain. The repair strategies are specific and have a high probability of being able to fix a plan. An empirical evaluation shows that adaptive path planning is suitable to highly dynamic domains, such as \RoboCup. Adaptive path planning reduces the cumulative planning time by a factor of $2.7$ compared to Bicchi's planner. At the same time, the quality of the plans generated by the adaptive path planner were similar to those generated by Bicchi's planner. |
| This paper describes a practical method for the camera calibration given a single image of a regular texture. This paper uses the calibration of images of skyscrapers as an example. The paper introduces two algorithms for the assignment of real world coordinates to feature points. The first algorithm selects five closely connected feature points and determines the orientation of the rectangular pattern. The second algorithm iteratively sorts the feature points and assigns real world coordinates to them. Lastly, the Tsai camera calibration algorithm is used to compute the camera parameters. |
| Description of application of our matching points algorithm to calibration of rectangular patterns |
| This paper describes a novel approach to detecting orientation and identity of robots using a global vision system. Instead of additional markers, the original shape of the robot is used to determine an orientation using a general Hough transform. In addition the movement history as well as the command history are used to calculate the quadrant of the orientation as well as the identity of the robot. An empirical evaluation shows that the performance of the new video server is at least as good as that of a traditional approach using additional coloured markers. |
| One of the reasons for organizing robotic games is that they allow researchers to evaluate their systems and approaches on a level playing field. This evaluation is important in a quickly developing field such as robotics with few real world applications. This paper investigates through a case-study how much participating at the RoboCup-99 competition has benefited a MSc. student at the University of Auckland. Although the participation was certainly stimulating, its influence on the research was indirect. The paper makes a number of suggestions that will make it easier to quantitatively evaluate research at these competitions and thus influence research more directly. |
| The tutorial describes the initial steps in the development of a robotic platform that can be used for many experiments into AI. The system uses remote controlled cars as platforms and is thus inexpensive and easily available. A standard framegrabber and video camera are used to provide vision information to the processor. The tutorial will lesson the learning curve for people by describing efficient methods for image processing and control. This methods have been developed by the All Botz in the previous years and have proven their effectiveness in many games and demonstrations. Effectively, this will provide participants with solutions to the low level problems associated with soccer playing robots. Therefore, the participants of the tutorial will be able to build their own team in short time and to use it to test higher level AI and Soft Computing methods. |
| While user modelling has produced many research-based systems, comparatively little progress has been made in the development of user modelling components for commercial software systems. The development of minimalist user modelling components which are simplified to provide 'just enough' assistance to a user through a pragmatic adaptive user interface is seen by many as an important step toward this goal. This paper describes the development, implementation, and evaluation of a minimalist user modelling component for the Tax and Investment Management Strategizer (TIMS), a complex commercial software system for financial management. This user modelling component manages several levels of adaptations designed to assist novice users in dealing with the complexity of this software package. Important issues and considerations for the development of user modelling components for commercial software systems and the evaluation of such systems in commercial settings are also discussed. |
| This paper describes a benchmark suite for mobile robots that provides quantitative measurements of a mobile robot's ability to perform specific tasks. Guidelines for the design of benchmark tests were derived from other areas faced with the problem of evaluating complex systems. The benchmarks test the control and accuracy of the path and trajectory tracking, the static path planning, and the dynamic path planning ability of a mobile robot. A set of metrics that provide important information about a mobile robot's performance are also presented. These benchmarks could also be used as simple games. Their inclusion in robotic games will lead to an increased opportunity fo researchers to evaluate their work without having to buy expensive or special purpose equipment. |
| This paper describes a practical method for calibrating the geometry and colour information for cameras surveying large rooms. To calibrate the geometry, we use a semi-automatic system to assign real world to pixel coordinates. This information is the input to the Tsai camera calibration method. Our system uses a two stage process in which easily recognizable objects (squares) are used to sort the individual data points and to find missing objects. Fine object features (corners) are used in a second step to determine the object's real world coordinates. An empirical evaluation of the system shows that the average and maximum errors are sufficiently small for our domain. Objects are recognized through coloured spots. The colour calibration uses six thresholds (Three colour ranges (Red, Green, and Blue) and three colour differences (Red - Green, Red - Blue, Green - Blue)). This paper describes a fast threshold comparison routine. |
| Description of our camera and colour calibration |
| This paper describes an architecture for path planning and control of car-like mobile robots. The method is based on a subsumption architecture with four individual behaviors: approach, steer, turn, and progress. The coordination of these simple behaviors results in a robust control architecture for mobile robots that performed well when compared to other control methods. The controller also results in simplifying the requirements on the path planner. |
| Description of our controller for 2000. Mainly based on a Ben's work |
| Description of our adaptive path planner |
| This paper discusses some important features, which make the All Botz, the University of RoboCup team, a very unique team. In particular, the use of cheap hardware and the design of the video server. |
| Description of our RoboCup Team |
| This paper investigates the use of reinforcement learning in solving the path-tracking problem for car-like robots. The reinforcement learner uses a case-based function approximator, to extend the standard reinforcement learning paradigm to handle continuous states. The learned controller performs comparable to the best traditional control functions in both simulation and also in practical driving. |
| Description of Yuming's MSc thesis work. A reinforcement learning controller using a case based reasoning system to deal with a a continuous control space |
| This paper describes the design and implementation of Ferret, an information-seeking assistant that helps a user find information on the World Wide Web. It analyzes and automatically clusters the returned pages from a search engine. |
| This paper describes a fuzzy logic controller for car-like mobile robots. It also introduces a simple heuristic that helps a designer in the specification of fuzzy input and output sets. The design of fuzzy rules follows intuitively from the design of the fuzzy input sets. In practical tests, this Fuzzy Logic controller resulted in greatly reduced errors and also resulted in a control law with 75\% less control work than a traditional sliding mode controller. |
| Description of the fuzzy logic controller for our toy cars. |
| This paper describes the design and implementation of an embedded system for the low level control of autonomous mobile robots. The micro controller board provides more accurate speed and direction control, more reliable digital communication, and facilities for additional sensors and actuators. The velocity control is implemented by a one bit D-A converter using pulse width modulation. The data rate of the digital communication is limited to five Bytes/sec., which is sufficient for simple navigation tasks. |
| This paper describes the design of an interface board which by emulating the bus of some popular home computers can control legacy hardware through a generic parallel port interface and serial interface. In particular, the board is currently being used to control two Mentor robot arms from a PC. We also developed firmware and a device driver for the Linux operating system. |
| Description of parallel port interface board |
| This paper introduces multi-strategy planning and describes its implementation in the \DoLittle\ system, which can combine many different planning strategies, including means-ends analysis, macro-based planning, abstraction-based planning (reduced and relaxed), and case-based planning on a single problem. \emph{Planning strategies} are defined as methods to reduce the search space by exploiting some assumptions (so-called \emph{planning biases}) about the problem domain. \emph{General operators} are generalizations of standard \Strips\ operators that conveniently represent many different planning strategies. The focus of this work is to develop a representation weak enough to represent a wide variety of different strategies, but still strong enough to emulate them. The search control method applies different general operators based on a strongest first principle; planning biases that are expected to lead to small search spaces are tried first. An empirical evaluation in three domains showed that multi-strategy planning performed significantly better than the best single strategy planners in these domains. |
| This paper describes our practical experiences and methods for calibrating a large room. We show a semi-automatic system to assign real world coordinates to image features. Our system uses a two stage process in which easily recognizable objects (squares) are used to sort the individual data and to find missing objects. Fine object features (corners) are used in a second step to determine the image real world coordinates. An empirical evaluation of the system shows that the average and maximum errors are sufficiently small for our problem domain (autonomous mobile agents playing soccer) |
| This paper discusses the design of an interface for a PC and a commercially available remote-controlled car. The objective of the project is to provide the capability for a PC to emulate a conventional RC transmitter. The micro-controller-based design provides the best means of extendibility and flexibility where future requirements are yet to be defined, it also significantly reduces the processing requirements on the host PC and the client application. The data communications between the host PC and the interface is via a standard parallel port implementation that provides a platform independent communications medium. The firmware design is based on a single, restart-able task paradigm with interrupts for communications and other system functions. This is motivated by a need for quick execution of commands by the interface. An active braking application was used to evaluate advanced functionality, which produced encouraging results, and showed superior control compared with the original manual controller. A client application was written to test the functionality of the interface and data communications. |
| This paper introduces multi-strategy planning, which focuses on the selection and combination of different planning methods. Planning is the problem of finding a sequence of actions (operators) that will take an agent from one state (initial state) to a desired state (goal). This problem has gotten considerable attention in artificial intelligence. Unfortunately, theoretical results show that the general planning problem is intractable in complex domains. Therefore, a practical planning system reduce the search space. This reduction of the search space is based on assumptions (so called \emph{planning biases\/}) about the problem such as: the problem order, plan structure, or subgoal hierarchy. Given these assumptions about the task, a \emph{planning strategy\/} exploits the reduction in the search space and searches the resulting search space. Popular examples of planning strategies are means-ends analysis, case-based planning, macro-operators, abstraction hierarchies, and non-linear planning. Planning strategies based on a specific planning bias work well in domains, in which these assumptions are satisfied, but fail if these assumptions are not met. Furthermore, in complex domains it is possible that only parts of a task can be efficiently solved with a given planning method. But for other parts of the tasks, a different planning strategy may be appropriate. |
| Multi-strategy planning focuses on the selection and combination of different problem solving methods. Since planning is intractable in complex domains, researchers have developed different methods to restrict, restructure, or reorder the search space and to search the new space. These reformulations of the search space are based on assumptions about the domain or other features of the task such as the problem order, plan structure, or subgoal hierarchy. These planners, then, work well in domains where the underlying assumptions are met, and fail otherwise. Furthermore, in complex domains it is possible that only parts of a task can be efficiently solved with a given planning method. But for other parts of the tasks, a different planning strategy may be appropriate. The goal of multi-strategy planning is to alleviate this problem by selecting and combining different problem solving methods on a single problem. First, planning is seen as search through the space of partial plans. Different planning strategies can be described by the language of partial plans, the set of transformations on partial plans, and the search method. Secondly, the thesis develops a theory of multi-strategy planning and shows that a multi-strategy planner can exponentially improve performance over a single strategy planner and derives sufficient conditions for this improvement. Thirdly, the thesis proposes \emph{general operators} (\Strips\ operators with added refinements) as a representation for different planning strategies and shows how general operators can represent different planning methods. Fourthly, the thesis develops a search control method that, given a planning method expressed as a general operator reduces the associated search space similarly to the original problem solving strategy. % The search strategy is based on a cheapest first method. Based on % the assumption that all planning strategies have similar reduction % probabilities, the planning strategy with the smallest refinement % cost is selected. Since the generation of general operators may be cumbersome by hand, and since the system is intended as a part of a learning apprentice system, \DoLittle\ learns new general operators from examples. The planning bias learners are highly specific methods that have knowledge of \DoLittle's operator set and search method and create new general operators to exploit a given planning bias. Through an empirical evaluation, this research shows (a) that multi-strategy planning improves the performance over single strategy planning in some toy domains, (b) that multi-strategy planning can solve problems in at least one complex domain (the kitchen domain), and (c) and that an unordered subproblem coordinated multi-strategy planner performs better in the kitchen domain than a problem coordinated one. |
| The reviewed book is intended as a practical guide to transputer hardware design. The authors do not assume prior knowledge of the transputer architecture, but the reader should be familiar with more conventional micro-processor design. |
| Our research goal is to design systems that enable humans to teach tedious, repetitive, simple tasks to a computer. We propose here a learner/problem solver architecture for such a system. The problem solving module is able to combine diverse problem solving strategies on a single problem, by using a common representation for operators, and learning operators by analyzing solution traces. At the distributed processor level, the design provides a general dynamic load balancing system that has little domain knowledge. It is controlled from the next level by a tightly constrained planner. The distributed problem solver testbed enables us to design, experiment with, and evaluate our combined learning/problem solving system for automating users' repetitive tasks. |
| This paper describes different technologies that were used in a VLSI design course at the university of Calgary. The main goal of this paper is to show how the advent of new technology allows students to spend more time on design capture, logic simulation, and the design of test vectors, as opposed to the tedious tasks of implementing/fabricating a design and a test environment. This trend has lead to more and more complex and interesting projects. In recent years, the students used VHDL to create a behavioral description of their circuit and synthesize a schematic from it. The synthesis targets Actel or Xilinx FPGAs. The example project is the design of a GCD circuit, which the authors selected because of a number of desirable characteristics: most importantly, (a) it is complex enough to allow the students freedom in their design, and (b) it can easily be adapted to the available hardware resources. The paper includes a small example of the conversion from an algorithm into a finite state machines, one of the crucial steps in the design phase. In the future, we hope to use configurable hardware (the Algotronix \CHS) with a powerful connection to a host computer. This will allow students even greater flexibility in their design, since they can choose which parts are implemented in hardware and which are done through software. |
| Planning will be an essential part of future autonomous robots and integrated intelligent systems. After giving a brief introduction to the classical planning paradigm, this paper focuses on learning problem solving knowledge in planning systems. A general weak method for learning useful operators is the creation of macros. The paper first describes a novel approach to the selection and dynamic filtering of macros. The dynamic filtering approach is suggested for controlling the creation of operators. A new planning representation is proposed that uses a common representation for macros, abstractions, and cases. A general operator is represented by sequences of primitive or non--primitive operators. A macro is equivalent to a sequence of primitive, executable, operators with uninstantiated arguments. A case consists of primitive operators with instantiated arguments. An abstract plan is equivalent to a sequence of non--primitive operators at a lower level of abstraction. A learned indexing mechanism allows rapid access to relevant operators. The system is able to use both classical and case--based techniques. The general operators in a successful plan derivation would be assessed for the potential usefulness, and some stored. |
| It is well--recognized that in practical inductive learning systems the search for a concept must be heavily biased. In addition the bias must be dynamic, adapting to the current learning problem. Another important requirement is sustained learning, allowing transfer from known tasks to new ones. Previous work on dynamic bias has not explicitly addressed learning transfer, while previous case--based learning research suffers from a variety of problems. This paper presents a method of Case--Based Meta Learning (CBML), in which the cases are concepts, rather than instances, and retrieved similar concepts are used as a skeletal version space to speed up learning. CBML is independent of the concept representation language. The CBML--Clerk system, which learns repetitive operating system tasks, is presented as a demonstration. |
| It is well--recognized that in practical inductive learning systems the search for a concept must be heavily biased. In addition the bias must be dynamic, adapting to the current learning problem. Another important requirement is sustained learning, allowing transfer from known tasks to new ones. Previous work on dynamic bias has not explicitly addressed learning transfer, while previous case--based learning research suffers from a variety of problems. This paper presents a method of Case--Based Meta Learning (CBML), in which the cases are concepts, rather than instances, and retrieved similar concepts are used as a skeletal version space to speed up learning. CBML is independent of the concept representation language. The CBML--Clerk system, which learns repetitive operating system tasks, is presented as a demonstration. |
| The symmetric version space algorithm (SVS) learns disjunctions of string patterns by example. The learnable string concepts are a subset of regular expressions. The running time of the algorithm is {\em reduced}, because the system learns a top--down description of the string concepts. Different parts of the algorithm learn descriptions at different levels of the concept independently. This technique is similar to factoring the version space, in order to restrict the search space. The problem of {\em fragmentation} of the $G$--set is overcome by using a symmetric version space approach. |